- πbywayofΦquartercircle.jpg (183.82 KiB) Viewed 23613 times
I have been working on a way to explicitly show the π deficiency such to clarify how/why space and time are reciprocally related as a natural consequence of ordinary mathematics (and/or vice versa). This is in relation to the postulates of RSoT.
In essence: such a clarification would lend further credence to the postulates as they stand,
however
one might find a need to
question whether or not
motion is the constituency of the "whole" universe,
as: if the universe
also contains that which is
not physical (ie. consciousness) the 'motion' constituency
must be confined to the physical universe only, rather than the universe as a whole (as presently postulated).
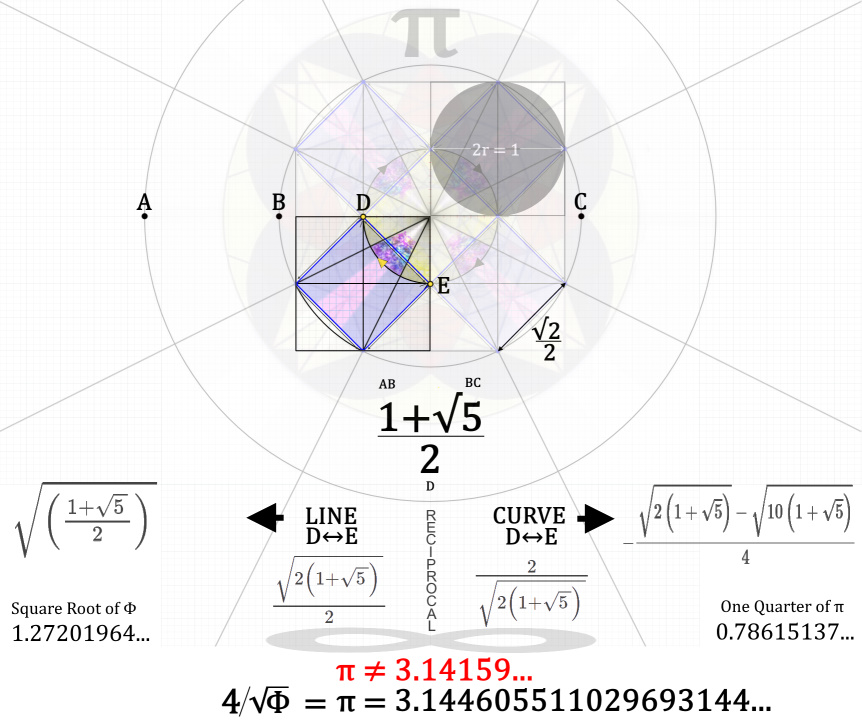
In the image, AB (rational, terminating +1) may be a discrete unit(s) in relation to BC (irrational, non-terminating √5). When summed as AC and halved at point D, the latter
incessantly coincides with the circumference of the circle whose properties are 2r = 1. This is
true about the circumference of the
entire circle, provided the
integrity of the relation is preserved (as rotated about the origin). What we are interested in is point D in relation to E, as this relation "grounds"
both the unit square
and 2r = 1 circle: line and curve, as they follow naturally from +1 and √5 respectively. This is thus honoring the integrity of the relation, and ultimately why the Riemann Hypothesis is
true (by Ananke: it can not
not be true).
(The reason is relating to the dividing of one by
"two". These "two" must be
reciprocally related such that a multiplicative operation would render their reunion. Insert: rational (real) and irrational
"imaginary" numbers. Their product is always one viz. 1 = Φ(π/4)², thus the real element must be "1/2" occupied by the real reciprocal of the "imaginary" element. This clarifies complex analysis as an inventive way to describe the interaction between rational and irrational numbers
according to ordinary mathematics. 'Ordinary mathematics' is contained in the postulates of Mr. Larson.)
_________________________________________________
CKIIT effectively finds these real/imaginary components as knowledge/belief resp.,
a perpetual dichotomy wherein one is always at the expense of the other. This is presently reflected
in the long-standing "believer vs. unbeliever" conflict.
The diagonal of a unit square is √2 and can be used to compose a lattice of smaller squares (shown in blue) of side √2/2. As it turns out, these squares were/are the "missing link" as they incessantly link any four equidistant points of a 2r = 1 circle. It is for this reason that "imbuing" Φ with √2/2 produces the (real) square of Φ in incessant relation to the 2r = 1 circle (and thus corresponding unit square as it applies to 'discrete units'). This is significant because one may then take the
reciprocal of this relation such to precisely measure/account for the consequent curve of DE. The
reciprocal of the square root of Φ is equal to the length of one quarter circle, and this is how/why π = 4/√Φ and not the "approximated" transcendental pi god (
practically) of 3.14159... (the gravity of this "approximation" error measures over thousands of years of human ignorance, and
any advanced civilization would certainly use π as a standard of measure for immediately knowing how "progressed" another civilization is.)
What is interesting about all of this is: the reciprocal contains the mechanics of the rotation(s), such to measure and account for. The first quarter is
subtracted such to gather the information of the circle/rotation (in/as
one quarter) then has five equal quarters added, the extra quarter to account for the first subtracted. This -1+5=4 quarters mechanic allows for an
exchange of information: collection upon -1 and exchange upon +5 = 4. The result is one particular circle composed of four symmetrical quarters, the properties of which (speed/energy) are as collected upon the subtraction the first quarter of the same.
If it is possible to show that the photon (ie. light, s/t = 1) is composed of an equivalent Α/Ω (direction) and beg/end (location) axis,
and the beg/end axis is effectively
null on the photon such to have the capacity to become occupied viz. s/t ≠ 1,
this would indicate
the universe can not have a beg/end.
This may be a precursor to understanding how/why the "Big Bang" model (and associated Relativity) is concealing perhaps what could be the greatest real
"misconception" in existence controlling the minds of the masses: if the universe was/is not "created" (ie. is
eternal), this is thoroughly catastrophic for any/all "creationist" accounts of the (real) physical universe in which we live.